Docker部署rm_vision
(网络) 网线调参 + 通过ssh在Vscode中查看/修改容器中的代码
保姆级教程
一、安装Docker
1、卸载Docker
由于部分NUC预装的Docker镜像版本可能过老,推荐安装最新的Docker,否则可能导致构建镜像时出现奇怪的报错
(1)删除docker及安装时自动安装的所有包
sh$ apt-get autoremove docker docker-ce docker-engine docker.io containerd runc(2)查看docker是否卸载干净
sh$ dpkg -l | grep docker $ dpkg -l |grep ^rc|awk '{print $2}' |sudo xargs dpkg -P # 删除无用的相关的配置文件(3)删除没有删除的相关插件
sh$ apt-get autoremove docker-ce-*(4)删除docker
sh$ rm -rf /etc/systemd/system/docker.service.d $ rm -rf /var/lib/docker(5)确定docker卸载完毕
sh$ docker --version
2、安装Docker
鱼香ROS一键安装
sh$ sudo wget http://fishros.com/install -O fishros && bash fishros确定安装完成
sh$ docker --version
二、构建rm_vision镜像并部署(已经构建完成,可直接拉取,见步骤3)
1、创建镜像(基于本队代码)
- 构建Dockerfile文件,输入以下内容
FROM ros:humble-ros-base
RUN sed -i 's@http://archive.ubuntu.com/@http://mirrors.aliyun.com/@g' /etc/apt/sources.list
# create workspace
RUN mkdir /ros_ws
WORKDIR /ros_ws/
# clone projects
RUN git clone https://gitee.com/gsq0226/src.git && cd src
# install dependencies and some tools
RUN apt-get update && rosdep install --from-paths src --ignore-src -r -y && \
apt-get install ros-humble-foxglove-bridge wget htop vim -y && \
rm -rf /var/lib/apt/lists/*
# install dependencies
RUN apt-get update && \
apt-get install -y \
git \
cmake \
vim \
libgflags-dev \
libgoogle-glog-dev \
ros-humble-asio-cmake-module
# install Abseil
RUN cd /tmp && \
git clone https://github.com/abseil/abseil-cpp.git && \
cd abseil-cpp && \
mkdir build && \
cd build && \
cmake .. && \
make -j4 && \
make install && \
rm -rf /tmp/abseil-cpp
# install Ceres Solver
RUN cd /tmp && \
git clone https://gitee.com/mirrors/ceres-solver.git && \
cd ceres-solver && \
mkdir build && \
cd build && \
cmake -Dceres_use_absl=ON -Dabsl_BUILD_TESTING=OFF .. && \
make -j4 && \
make install && \
rm -rf /tmp/ceres-solver
# setup zsh
RUN sh -c "$(wget -O- https://ghproxy.com/https://github.com/deluan/zsh-in-docker/releases/download/v1.1.2/zsh-in-docker.sh)" -- \
-t jispwoso -p git \
-p https://ghproxy.com/https://github.com/zsh-users/zsh-autosuggestions \
-p https://ghproxy.com/https://github.com/zsh-users/zsh-syntax-highlighting && \
chsh -s /bin/zsh && \
rm -rf /var/lib/apt/lists/*
# build
RUN . /opt/ros/humble/setup.sh && colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
# setup .zshrc
RUN echo 'export TERM=xterm-256color\n\
source /ros_ws/install/setup.zsh\n\
eval "$(register-python-argcomplete3 ros2)"\n\
eval "$(register-python-argcomplete3 colcon)"\n'\
>> /root/.zshrc
# source entrypoint setup
RUN sed --in-place --expression \
'$isource "/ros_ws/install/setup.bash"' \
/ros_entrypoint.sh- 构建镜像
$ sudo docker buildx build -t rm_vision01 .2、推送镜像至阿里云镜像仓库
- 登录阿里云Docker Registry
$ docker login --username=aliyun9970473437 crpi-f5v2195568vh2w3m.cn-qingdao.personal.cr.aliyuncs.com将镜像推送至Registry
[!NOTE]
当前镜像版本号为
01(后续视情况更新)[ImageId]:参照本地仓库镜像ID
docker login --username=aliyun9970473437 crpi-f5v2195568vh2w3m.cn-qingdao.personal.cr.aliyuncs.com
docker tag [ImageId] crpi-f5v2195568vh2w3m.cn-qingdao.personal.cr.aliyuncs.com/sr_vision/sr_vision01:[镜像版本号]
docker push crpi-f5v2195568vh2w3m.cn-qingdao.personal.cr.aliyuncs.com/sr_vision/sr_vision01:[镜像版本号]部分Docker常用命令
- 查询镜像信息
$ docker imagesExample of terminal output message
REPOSITORY TAG IMAGE ID CREATED VIRTUAL SIZE registry.aliyuncs.com/acs/agent 0.7-dfb6816 37bb9c63c8b2 7 days ago 37.89 MB- 查询所有的容器
$ docker ps -a- 查询正在运行的容器
$ docker ps停止运行容器
新建终端
$ docker stop <CONTAINER ID>- 重新开启容器
$ docker start <CONTAINER ID>[!WARNING]
Docker中
run和start的区别:run命令只在第一次运行镜像操作时使用,相当于执行了两步操作,将镜像放入容器中然后将容器启动;而start命令在重新启动已经存在的镜像时使用,使用该命令需要知道容器的id或者名字。
3、拉取镜像(可以直接从这步开始)
从Registry中拉取镜像
[!IMPORTANT]
镜像版本号为
01(后续视情况更新)
$ docker pull crpi-f5v2195568vh2w3m.cn-qingdao.personal.cr.aliyuncs.com/sr_vision/sr_vision01:[镜像版本号]- 查看镜像
$ docker image4、构建容器
(1)构建开发容器rv_devel(名称可以自定义,但是懒得改了)
$ docker run -it --name rv_devel \
--privileged --network host \
-v /dev:/dev \
-v $HOME/.ros:/root/.ros \
-v ws:/ros_ws \
crpi-f5v2195568vh2w3m.cn-qingdao.personal.cr.aliyuncs.com/sr_vision/sr_vision01:01(2)构建运行容器rv_runtime
$ docker run -d --name rv_runtime \
--privileged --network host \
-v /dev:/dev \
-v $HOME/.ros:/root/.ros \
-v ws:/ros_ws \
crpi-f5v2195568vh2w3m.cn-qingdao.personal.cr.aliyuncs.com/sr_vision/sr_vision01:01- 查看容器
$ docker ps -a三、在Windows远程连接Ubuntu使用Foxglove-bridge可视化运行
- 环境
Windows * 1
Ubuntu * 1
网线 * 1 —— 构建局域网,用于ssh连接
1、插网线,构建局域网
- 一端连接Windows,另一端连接Ubuntu
(1)在Ubuntu端,打开网络设置,设置为自动连接,其他不用更改
(2)Windows端
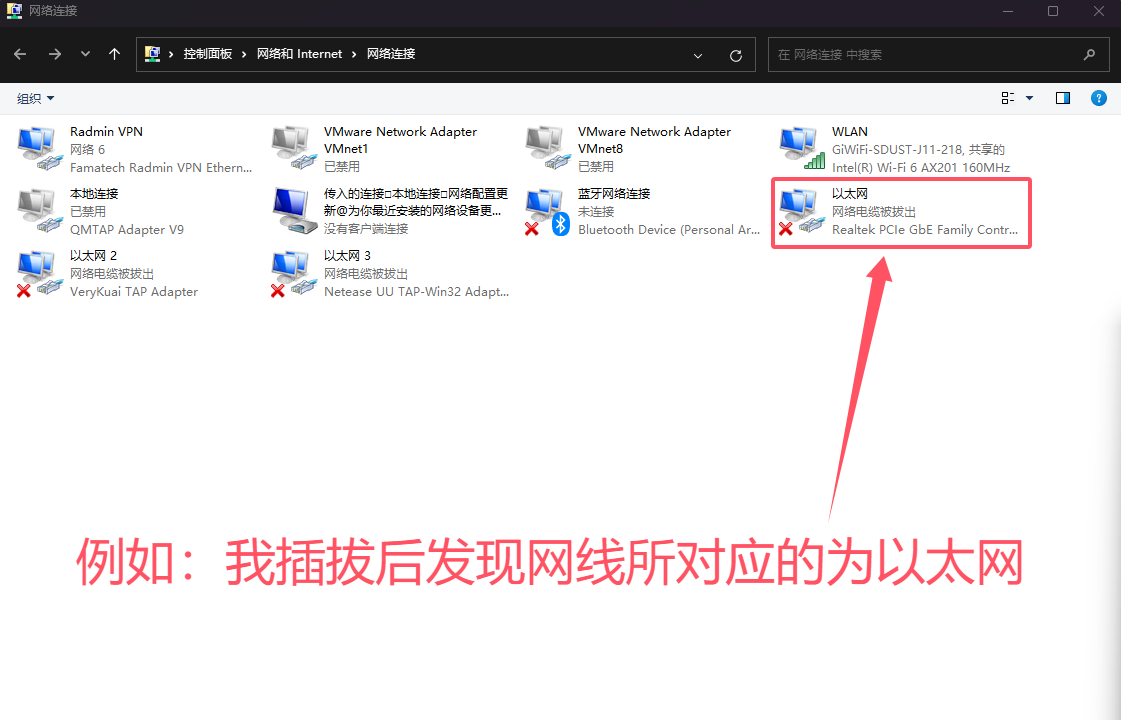
按
Win+R,输入ncpa.cpl此时弹出会更改网络适配器 的窗口,然后重新插拔网线,找到该网线对应的以太网
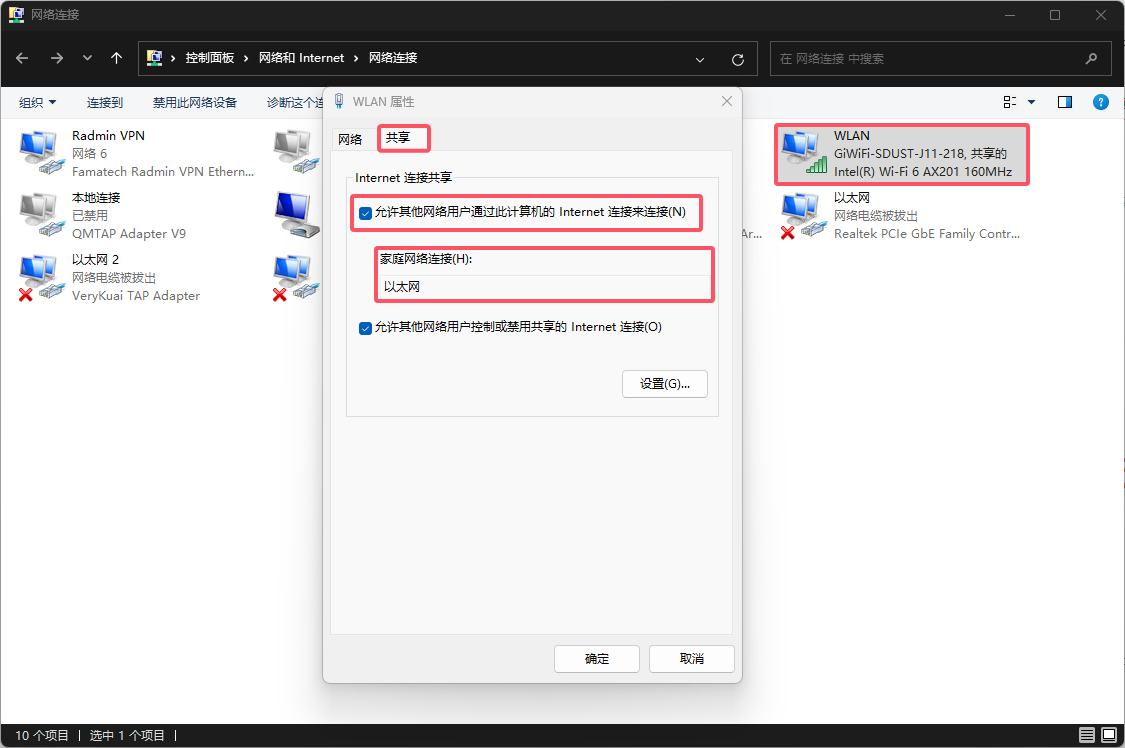
右键窗口中的
WLAN,该设备为你的无线网卡,点击属性,选择共享勾选允许其他网络用户通过此计算机的Internet连接来连接,然后在下方的家庭网络连接中选择网线所对应的以太网
查找设备的 IP 地址
使用快捷键
Win+R键,打开 Win 系统的运行窗口,在运行窗口下输入CMD回车,输入arp -a,在接口192.168.137.1网段下为动态类型的 IP 地址,默认第一个 IP 就是对应设备的 IP 地址。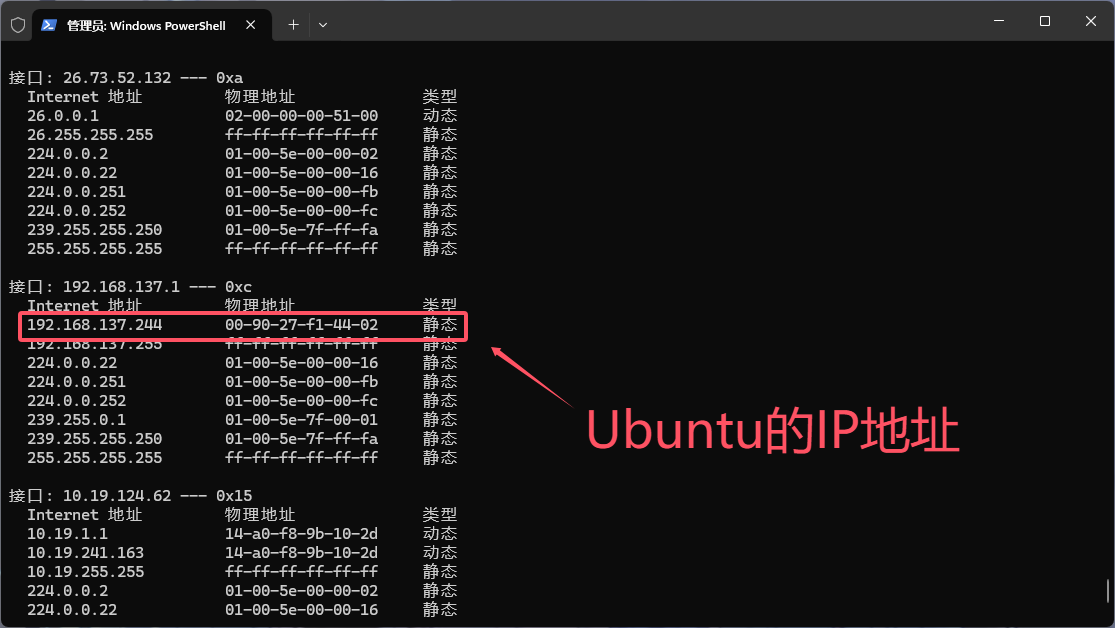
PS:如果没有则重新插拔Ubuntu设备上的网线
在Ubuntu一端,你也可以通过以下命令查询/获取IP
sh$ ifconfig
2、ssh连接 && Foxglove可视化运行
- 在Windows中下载客户端
首先确保你已经下载安装了Foxglove客户端
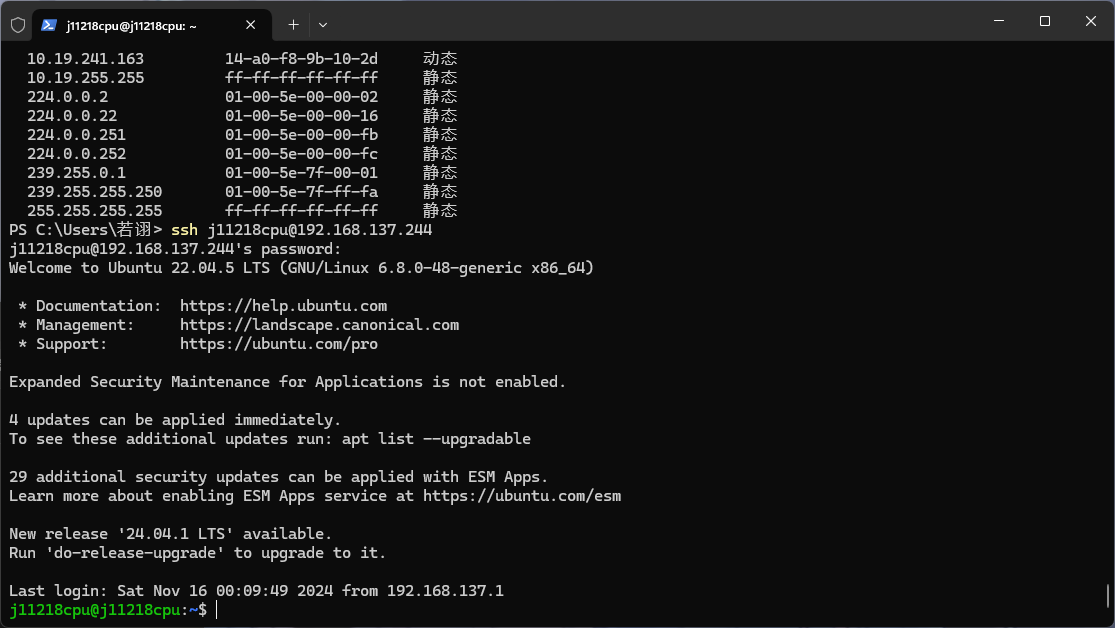
- ssh连接(该流程以我部署的为例)
Win+R,输入CMD回车,打开终端,在终端中输入ssh j11218cpu@192.168.137.244j11218cpu@192.168.137.244为你的终端名+IP地址
实验室NUC密码为:j11218cpu
实验室NX密码为:j11218nx
输入Ubuntu的管理员密码,此时你已经进入了Ubuntu的终端中
- 运行Docker容器
- 启动开发容器
- 在终端中输入
#启动容器
$ docker start rv_devel
#进入开发容器中
$ docker attach rv_devel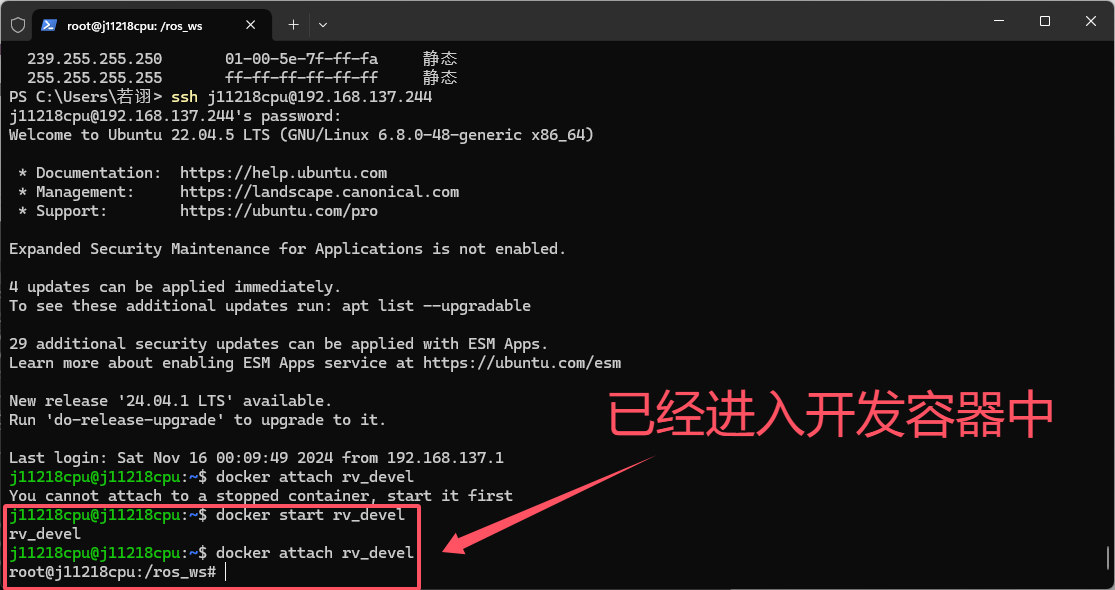
- 随后输入命令,启动
rm_vision
$ ros2 launch rm_vision_bringup vision_bringup.launch.py- 启动运行容器
- 在终端输入
#启动容器
$ docker start rv_runtime
#进入运行容器中
$ docker attach rv_runtime随后输入命令,运行可视化端口(发布数据)
PS:端口默认开放为8765
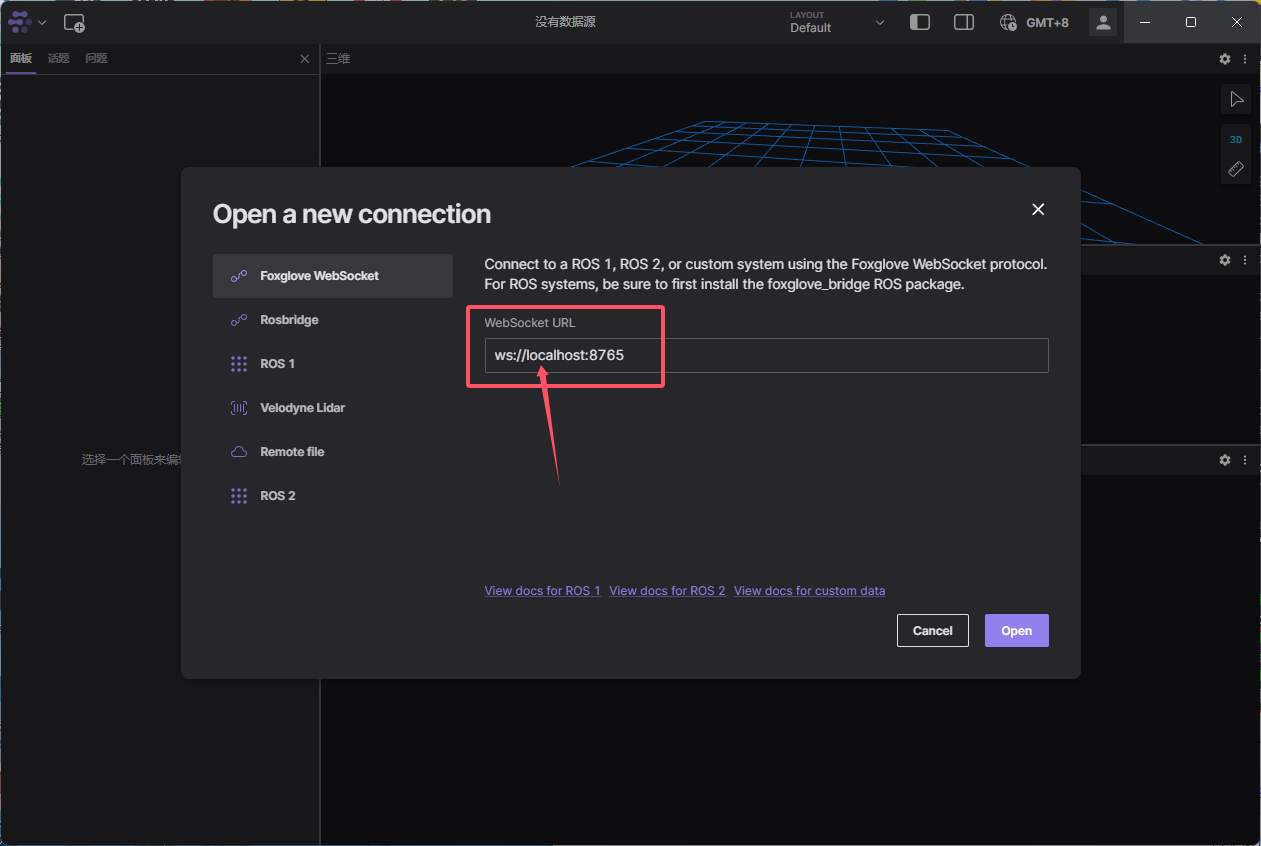
$ ros2 launch foxglove_bridge foxglove_bridge_launch.xml port:=8765- Foxglove可视化
打开 Foxglove,选择 Open Connection
将默认的localhost修改为**” Ubuntu的IP地址 “**——演示为192.168.137.244
3、通过ssh在Vscode中查看/修改容器中的代码
- 打开
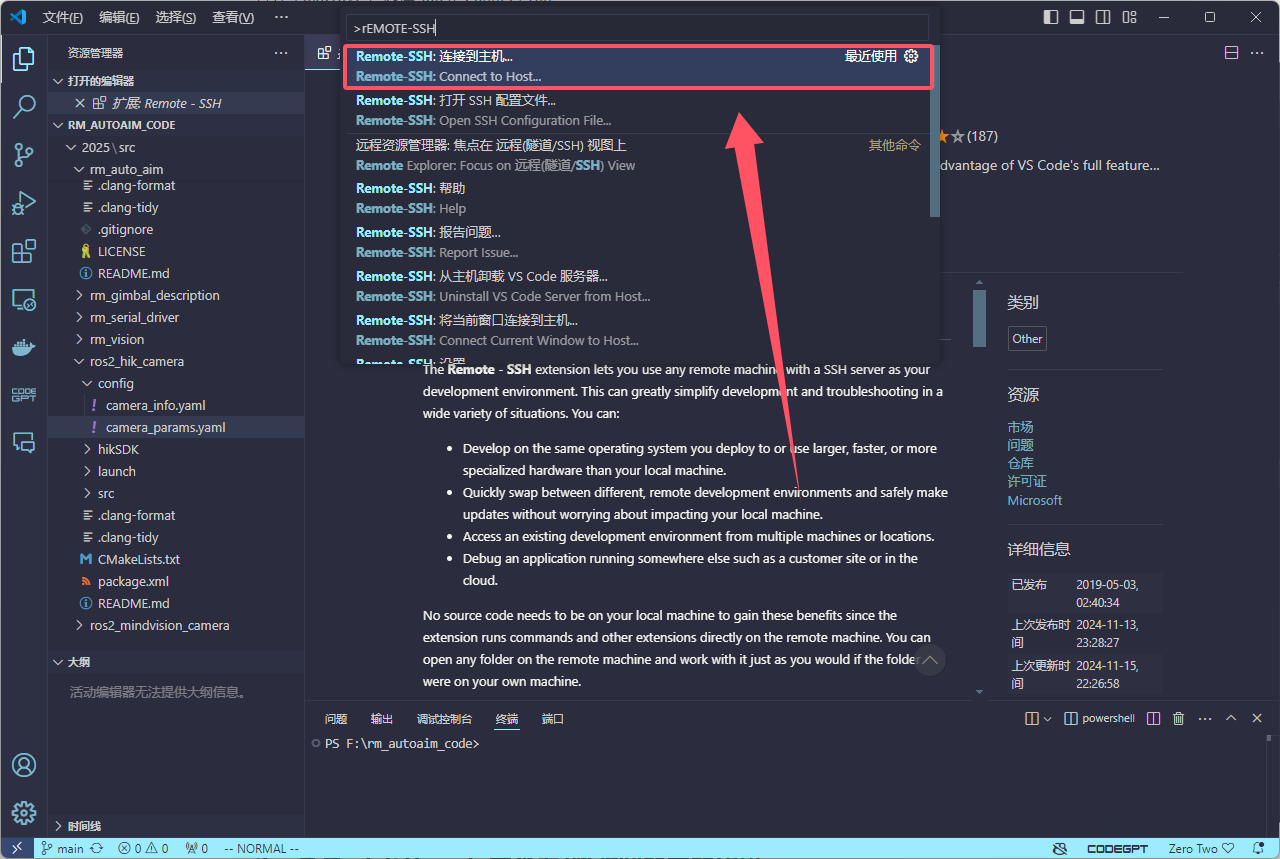
Vscode,选择左侧栏中的拓展应用商店,搜索下载Remote - SSH - 下载完毕之后,输入快捷键
Ctrl+Shift+P,打开Vscode的命令运行框
- 输入
Remote-SSH,在下方弹出的选项中选择Remote-SSH:连接到主机/Connect to Host...(汉化/未汉化)
点击添加新的SSH主机
输入Ubuntu主机名+IP地址(eg. j11218cpu@192.168.137.244)
输入Ubuntu管理员密码,添加完成
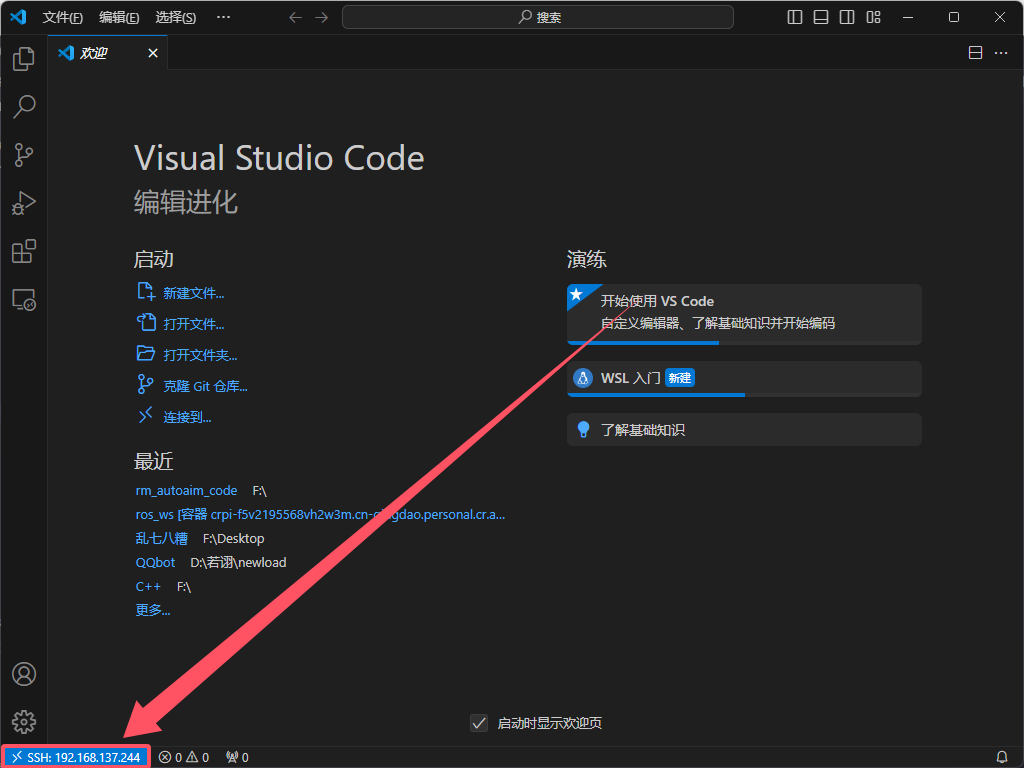
随后第一步,选择连接你刚才添加的主机,然后在弹出的新窗口中输入管理员密码,这样你就成功进入了Ubuntu中,左下角可见
- 进入容器
- 点击左下角,在上方弹出的选择框内选择附加到正在运行的容器/Attach to Running Container
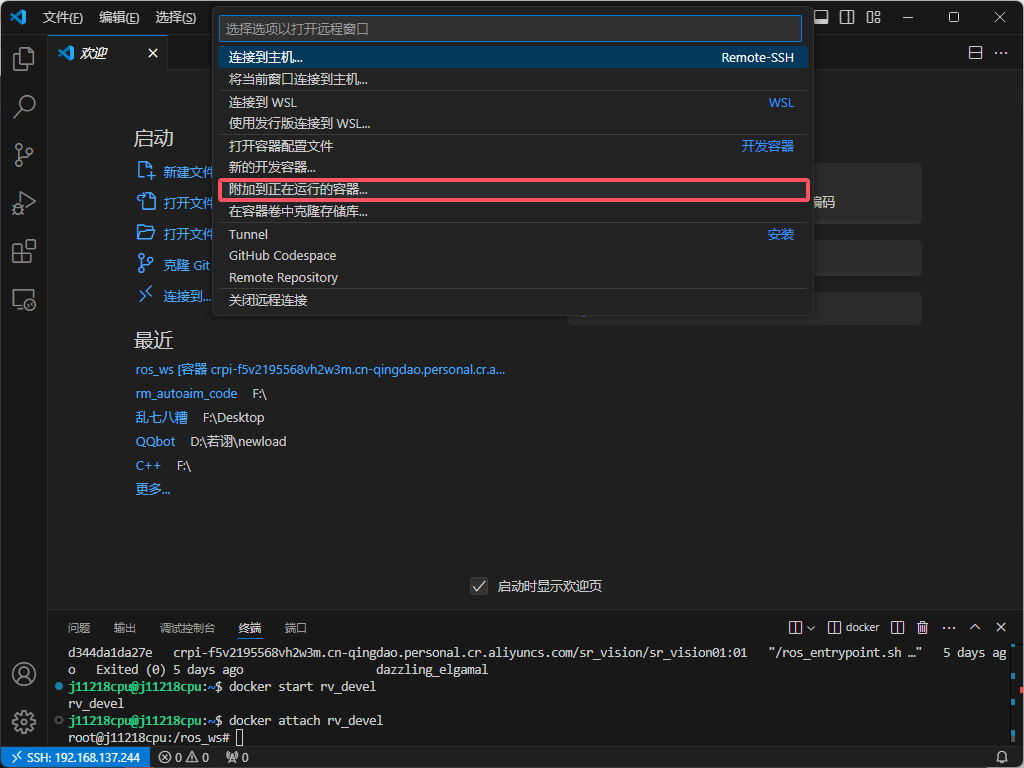
- 选择rv_devel,进入开发容器中,此时就可以编辑代码了


